目录 更新时间:2025-04-25 17:37
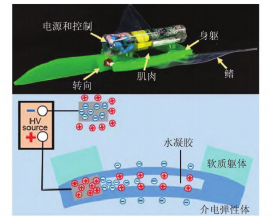
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电软机器人,能够进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行机器人因其对不同环境的特殊适应性而受到了相当大的关注,并应用于环境监测、勘探生物医学和设备检查。尽管许多刚性爬行机器人,包括轮式、跟踪和legged变体,它们能够为精细的操作或重型举重提供精确的控制和高有效载荷能力,它们对由刚性关节组成的复杂机构的依赖限制了它们穿越复杂地形的能力。与刚性机器人相比,软体机器人重量轻、可变形、成本低、材料灵活,并且具... ... 查看全文>
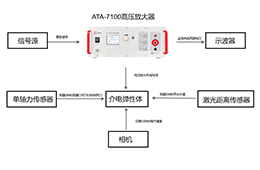
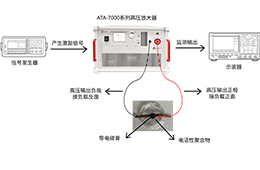
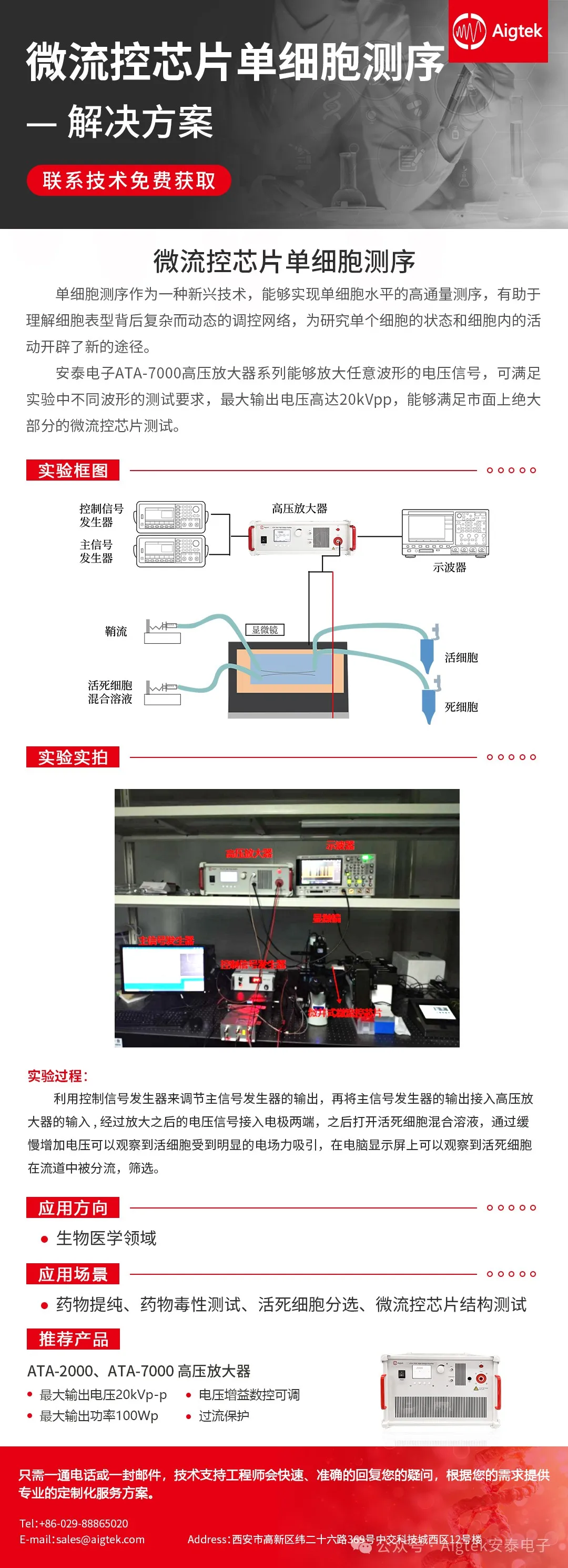
实验名称:基于逆整形的锥形介电弹性体隔振性能验证 测试设备:高压放大器、信号发生器、激光传感器、锥形介电弹性体驱动器、激振器、电脑等。 实验过程: 图1:基于逆整形控制的锥形介电弹性体主动隔振系统示意图 搭建如图1所示的隔振系统,采用丙烯酸和碳膏制作锥形介电弹性体驱动器,给与一定的预拉伸率和附加质量。刚性支撑结构将介电弹性体驱动器与激振器刚性连接,由信号发生器给出不同的激振信号,控制器为基于逆整形的主动隔振控制器,控制器由平方根非线性补偿器、PID反馈控制器和A-EID逆整形器组成。控制信号通过高压放大器进行放大,以电压信号的形式施加到锥形介电弹性体驱动器上。由激光位移传感器和数据采集装置将输出的位移信号同时反馈给电脑和控制器,反馈信号输入... ... 查看全文>
实验名称:圆柱驱动器的设计与性能测试 研究方向:基于介电弹性体的工作原理,设计了一种圆柱驱动器,在理论分析、结构设计、加工制作和具体应用等方面进行了阐述与分析。以VHB4910薄膜为介电弹性体材料,采用超弹性模型--Yeoh模型和Ogden模型,分别对圆柱驱动器的电致变形过程构建数学理论模型,分析了预拉伸率、加载电压等因素对驱动器的驱动性能(轴向应力、电致变形能力)的影响。以VHB4910薄膜为介电弹性体材料,采用超弹性模型--Yeoh模型和Ogden模型,分别对圆柱驱动器的电致变形过程构建数学理论模型,分析了预拉伸率、加载电压等因素对驱动器的驱动性能(轴向应力、电致变形能力)的影响。并且为了研究圆柱驱动器的安全可靠的工作空间,从热力学理论Hel... ... 查看全文>
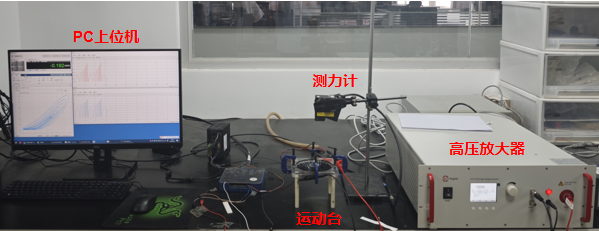
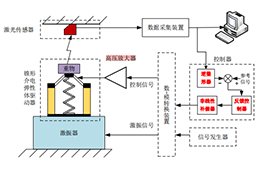
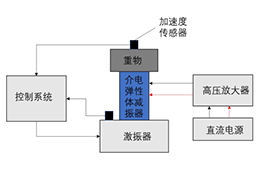
实验名称:介电弹性体减振器隔振实验 测试设备:高压放大器、介电弹性体减振器、激振器、直流电源、加速度传感器等。 实验过程: 图1:隔振实验平台 验测试平台如图1所示,由两个加速度传感器、一个振动台、一个高压放大器、一个直流电源、一个介电弹性体减振器、一个数值分析系统组成。介电弹性体减振器下部通过专用夹具和激振器连接在一起,激振器上固定有加速度传感器,用于采集激励端的位移信号;介电弹性体上端固定了一个重物,重物上固定有另一个加速度传感器,用于采集隔振保护端的位移信号。 试验测试平台可根据需要对激励台的输出设置不同的激振频率、激励幅值、激励信号类别等参数。进行测试时,根据激励信号,激振台对介电弹性体减振器进行激振,介电弹性体减振器下端随激励台... ... 查看全文>
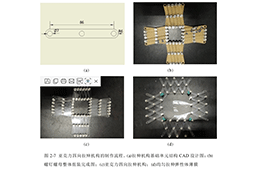
实验名称:最小能量结构电信号响应研究 研究方向:驱动器的工作行程、输出力矩直接决定着管道机器人的工作性能,电信号对驱动器的工作行程有着直接的影响。此外,软体管道机器人的向前运动方式与传统刚性管道机器人的前进方式不同,位移相比于电信号有着一定的滞后效应。所以还需要探究电信号对驱动器形变角度的影响并进行相应优化,从而提高驱动器负载能力和扩大驱动行程。 实验目的:讨论介电弹性体最小能量结构(DielectricElastomerMinimumEnergyStructure,DEMES)的动态特性,即电信号的波形、频率和峰值对DEMES的电致形变量的影响,在研究这些变量影响的实验中,使用已经进行了静力学优化的方案:材料拉伸率380%X300%;圆形镂空... ... 查看全文>
实验名称:柔性驱动器的性能测试 研究方向:机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能机器人。而随着科技社会的进步,机器人被赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性机器人无法触及的应用需求人们将研究的目光逐渐转向软体机器人。 软体机器人在机械和生物医学工程领域正不断凸显其不可替代的优势。它们不仅拥有柔软的身体,还能够根据复杂的物理场景调整身体形状,甚至能以刚性机器人无法做到的运动方式通过非常狭窄的通道。由于身体的柔软性,软体机器人接触尖锐的物体后... ... 查看全文>
高压放大器驱动介电弹性体的运动是一种常见且有效的方法,介电弹性体是一种材料,可通过施加电场来改变其形状和大小,广泛应用于机器人、扬声器、医学等领域。 在驱动介电弹性体方面,通常会将功率放大器与电解质介电弹性体配合使用。电解质介电弹性体是一种特殊材料,它在电场作用下会发生变形。合理施加电场是驱动介电弹性体运动的关键。 需要注意的是,为了确保运动控制的准确性,通常需要将电致弹性体与功率放大器驱动器、传感器和控制系统进行协同操作。 一、介电弹性体主要基体简介 介电弹性体基体材料多种多样,包括硅橡胶、硅树脂、丙烯酸酯、聚氨酯、丁腈橡胶、天然橡胶、亚乙烯基氟化三氟乙烯及其相应的复合材料等,其中应用最广泛的有三类:硅橡胶、丙烯酸酯和聚氨酯。 二、介电... ... 查看全文>
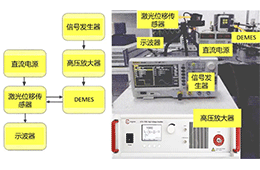
介电弹性体最小能量结构是一种利用DE材料的电致变形与柔性框架形变相结合设计的新型柔性驱动器,所谓最小能量是指驱动器在平衡状态时整个系统的能量最小,当受到外部电压刺激会产生相应的变形,但是当外界电压刺激移除时,系统会再次恢复至能量最小状态。在介电弹性体最小能量结构的软体驱动器设计当中高压放大器也被广泛应用。 高压放大器应用介电弹性驱动器模型 在介电弹性体最小能量结构的软体DEMES驱动器性能测试中,如图所示DEMES驱动器伸长量和阻抗力的测试原理示意图。在DE驱动器自由端安装“L”型纸板,将激光束打在纸板上; (2)通过信号源和高压放大器对DE驱动器施加电压;(3)随着电压的不断增大,直至DE薄膜击穿时停止测试;(4)将测试过程中的激光位移传感器所采集的... ... 查看全文>


88858cc永利官网(Aigtek)是国内领先从事测量仪器研发、生产和销售的高科技企业!
产品推荐
猜你喜欢