
























高压放大器在基于介电弹性体的管道机器人研究中的应用
实验名称:最小能量结构电信号响应研究
研究方向:驱动器的工作行程、输出力矩直接决定着管道机器人的工作性能,电信号对驱动器的工作行程有着直接的影响。此外,软体管道机器人的向前运动方式与传统刚性管道机器人的前进方式不同,位移相比于电信号有着一定的滞后效应。所以还需要探究电信号对驱动器形变角度的影响并进行相应优化,从而提高驱动器负载能力和扩大驱动行程。
实验目的:讨论介电弹性体最小能量结构(DielectricElastomerMinimumEnergyStructure,DEMES)的动态特性,即电信号的波形、频率和峰值对DEMES的电致形变量的影响,在研究这些变量影响的实验中,使用已经进行了静力学优化的方案:材料拉伸率380%X300%;圆形镂空区r、b、h分别为15mm、8mm、4mm;材料厚度为0.21mm。
测试设备:信号发生器、高压放大器、位移传感器、数字示波器等。
实验过程:
使用信号发生器,ATA-7050高压放大器产生驱动电压;设置测量距离为15cm,使用位移传感器测量对DEMES形变进行测量,保持测量范围在15-20cm;使用数字示波器,以500Hz的采样频率,进行测得数据记录。实验台设备连接图如图4-1(左)和实验装置图如图4-1(右)所示。

为了方便测量,实验选择测量驱动器两端的距离变化。
实验结果:
为研究DEMES在不同频率下的动态响应,将电压信号设置成如表4-1所示。
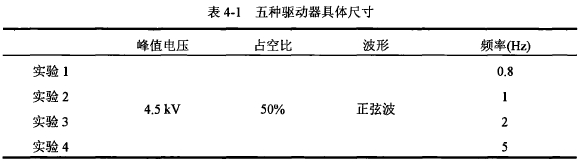
实验结果如图4-2,可以看出,DEMES在不同频率下的形变量差别较大,总体趋势是频率增大形变减小,这是由DE材料本身粘弹性决定的。DEMES的形变会后于电信号的发出,频率较高时,一个周期中DE材料上被施加了电压产生形变,DEMES的形变未达到极限电压就已经停止,相似地,在一个周期内停止施加电压的时域内,DEMES从形变状态恢复,直到接收到下个周期的电压信号,此时还未完全恢复,开始下个周期的形变,频率越高这种现象越明显。

为研究将DEMES在不同峰值下的动态响应,将电压信号设置成1Hz占空比50%的正弦波,分别以3kV、4kV、5kV为最大电压分别测得DEMES形变量,绘制曲线如图4-3所示。

DEMES的最大形变与最大电压成正相关,但是在同一时刻5kV与4kV形变量差大于4kV与3kV形变量差,即DEMES的形变量并不是简单地随电压增大而线性增大,而是随着电压增大,形变量增加的梯度也增大。在频率允许的情况下,随着峰值电压增大,形变量会增加,且增加量也会增大。
为探究DEMES在不同波形电压下的动态响应,将设置信号发生器以方波、三角波和正弦波的方式分别进行实验。为了尽量排除由制作、温度、时间等因素造成的误差这几种波形施加在同一驱动器进行实验。DEMES在高压下运动次数较多,避免材料性质随时间变化,电压采用较低的4.5kV,占空比50%,电信号频率为5Hz。
图4-4是三种不同波形驱动电压下的DEMES电致形变量。



图4-4方波、三角波和正弦波下的DEMES电致形变量
在方波信号下,驱动器被施加电压后产生形变,其速度逐渐减慢直到一个周期内的电压信号停止瞬间以一定速度恢复初始态,其速度逐渐减慢。在图上呈现尖锐的波峰,50%的形变量增大周期与占空比稍有滞后。DE材料具有一定粘弹性,所以其形变相比电压信号会有迟滞效果。
在三角波信号下,电压增加的半个周期内,驱动器被施加电压后产生形变,电压信号达到最大瞬间前速度减慢,电信号电压最大时,其速度几乎为0。
在正弦波信号下,除了第一个周期,驱动器被施加正弦波电压后,产生的形变量曲线呈正弦波,由于迟滞效应,整体波段相比电信号稍有滞后。
高压放大器推荐:ATA-7050

图:ATA-7050高压放大器指标参数
本资料由Aigtek88858cc永利官网整理发布,更多案例及产品详情请持续关注我们。西安88858cc永利官网Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。如想了解更多功率放大器等产品,请持续关注88858cc永利官网官网www.aigtek.com或拨打029-88865020。
原文链接:/news/3763.html