
























ATA-7020高压放大器在静电悬浮位置控制系统中的应用
实验名称:静电悬浮位置控制系统
实验原理:带电物体在静电场中会受到电场力的作用,如果电场力的大小能够克服自身的重力,带电物体就会浮起来。当半径为r的小球处于竖直方向的两极板间,若上下极板间加上负电压U,两极板间会产生由下往上方向强度为E的静电场,上极板带负电,下极板带正电。小球在静电场中会感应上正电,带电小球在电场的作用下会受到向上的库伦力F。小球受到的电场力能够克服其所受到的重力是带电小球悬浮的基本条件。本实验主要应用于材料科学领域,用其进行深过冷条件下的材料制备与凝固理论研究
测试设备:上位机、ATA-7020高压放大器、电极板、位置灵敏探测器、激光
实验过程:静电悬浮位置控制系统的基本控制方法是:探测悬浮样品的实际位置,当悬浮样品偏离两极板中心位置向下时控制系统输出控制信号增大极板电压,增大向上的浮力;当悬浮样品偏离两极板中心位置向上时控制系统输出控制信号减小极板电压,减小向上的浮力。
图一为静电悬浮实验系统图。系统以PSD为位置测量传感器,以平行激光光源作为PSD的照明光源,控制单元根据PSD测量到的二维(2、x)位置信号,分别进行控制算法运算,将控制信号输出给ATA-7020高压放大器,由ATA-7020高压放大器把电压控制信号进行放大,分别施加控制高压到上下电极和水平电极上,即通过调整静电场的大小调整带电样品所受到的电场力,实现对悬浮样品在Z方向和X方向上的位置控制。
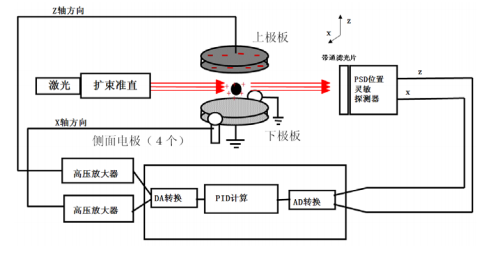
图一实验框图
悬浮对象采用直径约3mm的镀石墨陶瓷小球,当系统加电后,镀石墨陶瓷小球立即被悬浮起来并逐渐稳定到上下极板间的中心位置,悬浮情况如图二所示。

图二悬浮情况图
图三是根据上位机接收的PSD测量得到的Z方向位置数据经标定后,由Matlab绘制的悬浮起步过程。经放大后观察,可得到悬浮的精度在士0.05mm以内,如图四所示为0.7s内的悬浮情况。图四为示波器观察悬浮起步时PSD输出的Z方向位置信号和控制电压信号,其中CH1为位置信号,CH2为控制电压信号(实际值和观察值之比为2000:1)。可见,悬浮起步时的控制电压需大约7000V,而小球在两极板中心位置的悬浮控制电压只需约4000V。

图三悬浮起步过程

图四悬浮精度测定图

图五示波器观察悬浮起步过程
实验结果:当用上位机通过串口给单片机在线设定不同的悬浮目标位置时,小球能够很好的按照设定值上下移动到指定的位置,如图六所示。这表明,本实验设计的静电悬浮位置控制系统已经很好的实现了稳定悬浮和位置控制的功能。

图六调整位置过程图
采用650nm光源的竖直方向位置控制系统的位置控制精度为士0.05mm,这已经达到本实验静电悬浮位置控制系统的设计要求(0.25mm)。将来用性能更好的808nm激光器做位置测量,竖直方向的控制精度必然更高。另外,水平方向的位置控制不需要克服重力,中心位置是悬浮样品在水平方向电场力的平衡点,水平方向的位置控制主要是为了防止外界的干扰,那么水平方向的位置控制能够达到更高的精度。

图:ATA-7020高压放大器指标参数
本文实验素材由西安88858cc永利官网整理发布,如想了解更多实验方案,请持续关注安泰官网www.aigtek.com。Aigtek是国内专业从事测量仪器研发、生产和销售的高科技企业,一直专注于高压放大器、电压放大器、功率放大模块、高精度电流源等测试仪器产品的研发与制造。
原文链接:/news/3480.html